

撰文 | 黄雨佳
审校 | 二七
设想一下,当你被困在地震废墟之下,周围尽是倒塌的混凝土板和弯曲的钢梁,重重压力让你几乎无法动弹,绝望正在悄然地吞噬你。突然,你的耳边响起了一阵窸窸窣窣的声音。你瞪大眼睛,试图辨别黑暗中是什么在靠近。隐约间,一群小小的身影出现在你的面前——是蟑螂!
还记得我们曾介绍过的能执行救援任务的6厘米“赛博大蟑螂”吗?那时,科学家还在测试人为控制蟑螂来执行救援任务的可能性,但现在,科学家已经不再满足于单只“赛博蟑螂”的救援能力了。
在一篇最近发布于预印本网站arXiv的论文(未经同行评审)中,新加坡南洋理工大学的佐藤裕崇(Hirotaka Sato)团队已经更进一步:他们开发了一套装备,只需68秒就能组装出一只“赛博蟑螂”。这一进步使得批量生产“赛博蟑螂”成为了可能,“赛博蟑螂军团”的时代或许即将到来。
“赛博蟑螂”
为了应对地震废墟中的复杂地形,科学家早已投入大量精力开发昆虫大小的微型机器人。但这些机器人会面临诸如续航时间短、灵活性不足等问题。因此,另一部分科学家转而开发一种更加与众不同的解决方案:半机械半昆虫的“赛博昆虫”(即混合机器人,如果想了解更多混合机器人相关内容,可以阅读我们之前写过的杏鲍菇控制的机器人)。
与完全依赖机械设计的机器人相比,“赛博昆虫”具有不可忽视的优势。首先,它们几乎无需担心能源问题——只要少量食物,它们便能长时间运作。其次,它们天生适应复杂地形,不仅能轻松爬墙,还可以穿过狭窄的缝隙。此外,这些昆虫还具备超凡的嗅觉和触觉,能够快速探测化学物质、气体,甚至感知人类的存在。
在众多适合改造成混合机器人的昆虫中,马达加斯加发声蟑螂(Madagascar hissing cockroach)是其中之一。这种蟑螂体型仅几厘米,却能轻松承载高达15克的重量,足以装备红外摄像头、麦克风、环境探测器和定位装置等搜救必需品。如果这些装备齐全的“赛博蟑螂”能快速找到废墟中的幸存者,那么救援人员就可以依据它们传回的信号及时展开营救。
佐藤裕崇是一名“赛博蟑螂”爱好者。2011年3月11日,日本遭遇了9.1级大地震,夺走了上万人的生命。正是在那时,佐藤裕崇萌生了制造搜救机器人的想法。他开始研究如何将蟑螂改造成受控的“赛博昆虫”。
这一技术的关键在于给马达加斯加发声蟑螂植入电极,以控制其运动轨迹。蟑螂的前腿控制着蟑螂的运动方向,而它们的前腿又与一个名为前胸背板(pronotum)的结构直接相连。研究人员选择在这个区域植入电极,因为相比触角等其他控制区域,前胸背板更易于操作。
蟑螂的前胸背板与中胸(mesothorax)之间存在一层节间膜,研究团队在这层膜的左右两侧植入了一对双极电极。当某一侧电极发出刺激信号时,蟑螂对应侧的前腿便会收缩,驱使它转向;若同时刺激两侧电极,蟑螂则会减速。通过施加仅3伏特的电压,研究人员就能精准控制“赛博蟑螂”的运动方向和速度。
“蟑螂工厂”
然而,给蟑螂安装电极并非易事。这是一项极其精细的工作,此前只能依靠手工完成,组装一只“赛博蟑螂”往往需要一个多小时。而且,手工操作的稳定性难以保证,一不小心还可能对蟑螂造成不可逆的损伤。影响控制效果不说,还可能让尚未出马的“大将”首先折在了自己手上。
因此,佐藤裕崇一直有一个梦想:设计一条能够实现“赛博蟑螂”批量生产的自动化流水线。这不仅能解放研究人员的双手,更有助于应对灾后救援的实际需求。毕竟,越是险象环生的废墟现场,越需要大量“赛博蟑螂”齐心协力,只靠研究人员手搓显然并不现实。
然而,实现这个梦想绝非易事。尽管研究团队使用的都是5~6厘米的雄性马达加斯加发声蟑螂,但每只蟑螂的前胸背板在大小和形状上依然存在细微差异。对于给山楂去核这样的任务,机械臂只需大致瞄准即可,因为即便稍有偏差,最多也只是损失一些果肉。但给蟑螂安装电极则不同:双极电极必须精准且对称地植入节间膜的两侧,这对机械臂的定位能力提出了极高的挑战。
为了让机械臂能精准地将电极植入蟑螂体内,研究团队决定使用迄今最高端的技术之一——人工智能(AI)。他们测试了多种基于卷积神经网络(CNN)的AI模型,最终在机械装置中集成了一套深度学习驱动的视觉系统。这套系统通过分析摄像头拍摄的蟑螂图像,能识别出蟑螂的前胸背板结构,并准确标记植入双极电极的参考位置。
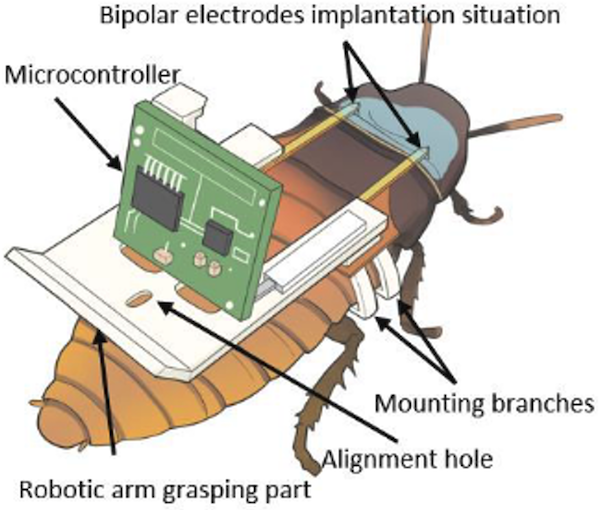
为了进一步简化安装流程,研究人员为蟑螂量身定制了一款“背包”,其中包含双极电极、微型控制器和安装部件。微型控制器由锂电池供电,一旦接收到无线信号,便能通过内置的4个刺激通道输出电信号,实现对蟑螂运动的远程操控。
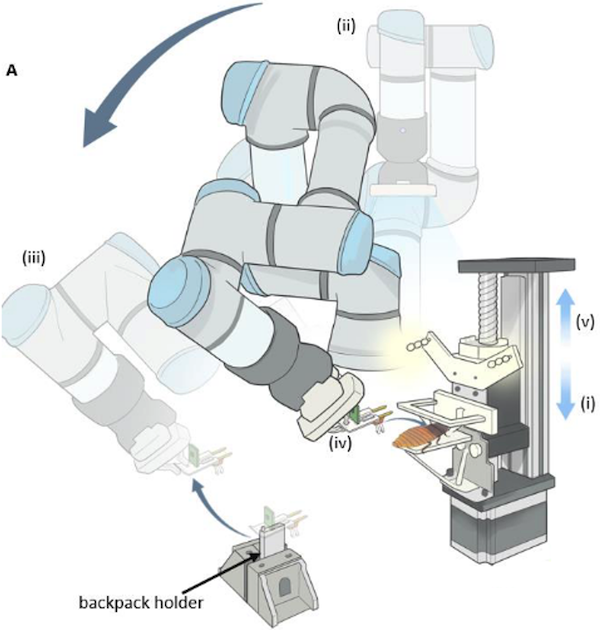
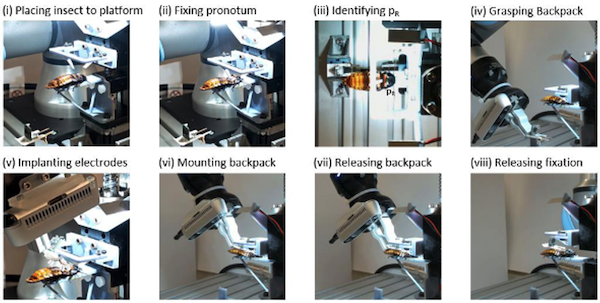
机械化生产开始了。研究人员用二氧化碳将蟑螂麻醉,而后将它固定在专门设计的结构上。机械装置中的两根杆轻轻施力,分别压向蟑螂前胸背板和中胸,将节间膜暴露出来。接下来,AI视觉系统识别出植入电极的最佳参考点,随后机械臂抓住“背包”,将双极电极植入节间膜,并将“背包”下压,使4个钩状结构牢牢扣住蟑螂后胸角质层。从开始到结束,仅需短短68秒,一只“赛博蟑螂”便组装完成,随时准备启用。
研究人员对比了机械装置组装的“赛博蟑螂”和传统手工制作的版本,结果显示二者的性能几乎相当,而且自动组装的“赛博蟑螂”在一致性和方向控制方面表现得更加优秀。在室外模拟的障碍环境中,这些机械组装的“赛博蟑螂”也顺利完成了任务:4只“赛博蟑螂”组成的“大军”仅用了大约10分钟便扫荡了一片1平方米的区域。
尽管如此,要让这些“赛博蟑螂”真正投入救援行动,还有不少挑战需要克服。例如,它们当前只能通过研究人员的远程操控行进。而在废墟中的复杂地形下,获取和传输信号可能会遇到困难,因而限制其使用场景。不过,通信技术的进步或许能在未来解决这些问题。
也许有一天,当我们真的身处灾难之中,耳边响起的窸窸窣窣声将会为我们带来希望的曙光。
参考链接:
https://arxiv.org/abs/2411.13164
https://singularityhub.com/2024/12/05/automated-cyborg-cockroach-factory-could-churn-out-a-bug-a-minute-for-search-and-rescue/
https://www.sciencetimes.com/articles/47547/20231208/cyborg-cockroach-helps-locate-earthquake-survivors-opens-new-paradigm-search.htm
https://www.htx.gov.sg/news/featured-news-foe-today-friend-tomorrow-cyborg-cockroaches-could-save-your-life
封面图来源:原论文